El Instituto de Nuevas Tecnologías de la Imagen constituye un instrumento eficaz para potenciar y fomentar la actividad investigadora relacionada con las tecnologías de la imagen.
La Universidad Jaume I es el organismo que acoge al INIT.
NOTICIAS DESTACADAS
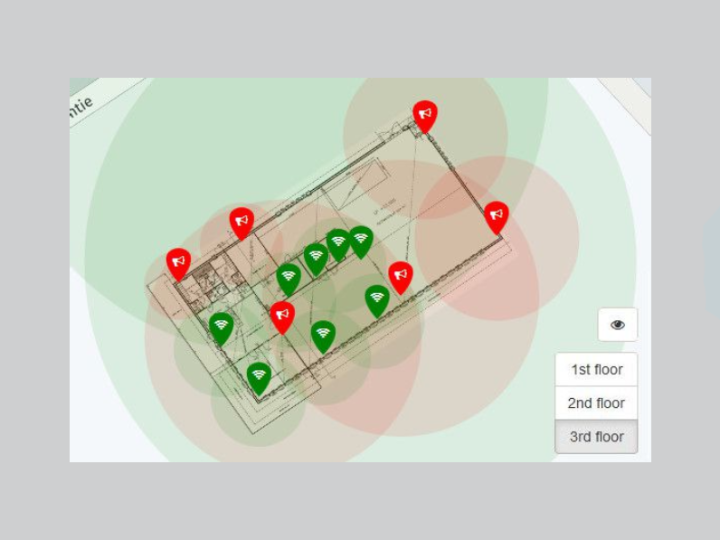
10 años de UJIIndoorLoc: Un hito en la investigación de posicionamiento en interiores
En un hito que marcó un antes y un después en el campo de la…
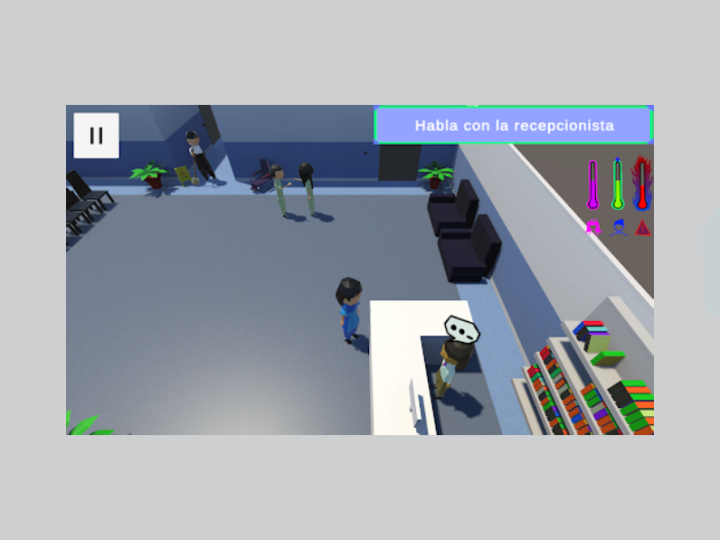
Desarrollo de un videojuego de gestión sanitaria para enfermeras liderado por el grupo IA3
El grupo IA3 del Instituto de Nuevas Tecnologías de la Imagen (INIT), en colaboración con…

La UCIE-INIT del INIT Destaca su Presencia en las Ferias Cevisama, ForInvest y Transfiere 2024
La Unidad Científica de Innovación Empresarial (UCIE) del INIT ha tenido una participación destacada en…